本文讨论下无人驾驶领域的路线规划和控制相关的技术。1.路线规划
1.1 路线规划采用A*算法
(具体过程和流程后续补上)
1.2 路线规划转化为实际行驶路线

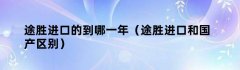
如上图所示,s表示路线规划起点,e表示路线规划终点,斜线填充的网格表示障碍物位置。
蓝色的线为路线规划算法规划出的路线,但在实际行驶中,车辆不可能直接原地90度的转弯,不仅可操作性不强,,对于乘客也是非常危险的行为。在实际的行驶中,我们更希望车辆的路线如红色线路所示,非常平缓的从起点驶向终点(绿色路线虽然距离更近,但起点45度的转角也会让乘客不适)。
那么我们的问题来了,如何由路线规划算法生成的路线转换为实际行驶的路线,即如何由蓝色路线生成红色路线呢,如何由蓝色路线生成平滑的红色线路呢?
假设路线规划的结果为点序列:[x1,x2,…xn]
平滑后路线规划的点序列:[y1,y2,…yn]


求解最优解的方法采用梯度下降法(gradient descent),即通过多次迭代,调整yi使得目标函数取得最小值。